大家好,我是被深圳太阳晒得脱水的小鱼,周末立了flag要做一个工具,今天就给发布了。  起因是一位群友在鱼群里问小鱼怎么把ROS2的bag文件转成txt的,小鱼科学上网查了查,发现还真没有对应的方法,于是小鱼就打算做一个出来,截止到今晚终于算是完成了初版的了。
起因是一位群友在鱼群里问小鱼怎么把ROS2的bag文件转成txt的,小鱼科学上网查了查,发现还真没有对应的方法,于是小鱼就打算做一个出来,截止到今晚终于算是完成了初版的了。
废话不多说,上正题。
安装使用将ROS2的Bag文件转换为CSV、JSON等。
一、安装命令行安装:
sudo pip install ros2bag_convert
下载安装:
git clone git@github.com:fishros/ros2bag_convert.git
cd ros2_convert
python3 setup.py bdist_wheel
sudo pip install dist/ros2bag_convert-0.1.0-py3-none-any.whl
目前仅支持将数据转换为csv格式,结果将输出到xxx.db3同级目录。
ros2bag-convert xxxx.db3
ros2 topic pub test geometry_msgs/msg/Pose '{position:{x: 0.0,y: 0.0,z: 0.0}, orientation: {x: 0.0,y: 0.0,z: 0.0,w: 1.0}}'
ros2 bag record test
ros2bag-convert xxxx.db3
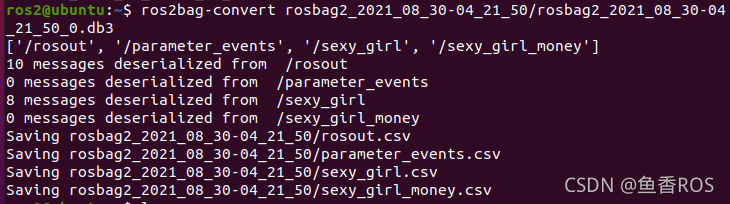 成功将记录李的话题数据提取出来并分别存储成csv格式文件
成功将记录李的话题数据提取出来并分别存储成csv格式文件 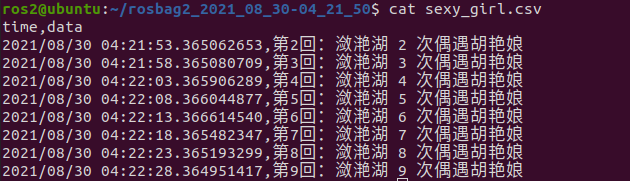
这次做这个工具的过程中看了一下rosbag2的源代码,小鱼不由得对作者竖起了大拇指,模块化插件化的设计,令人佩服。 小鱼深感道阻且艰难,希望能和鱼粉们一起成长!

