#
重投影误差 偶尔在一篇文章中看到有关于重投影误差的介绍,简洁明了,现整理如下,同时也算是对自己图像基础知识的夯实打牢。 在计算机视觉中,经常会用到重投影误差(Reprojection error)。比如在计算平面单应矩阵和投影矩阵的时候,往往会使用重投影误差来构造代价函数,然后最小化这个代价函数,以优化单应矩阵或者投影矩阵。之所以使用重投影误差,是因为它不光考虑了单应矩阵的计算误差,也考虑了图像点的测量误差,所以其精度比单边或者对称变换误差高。 以平面单应矩阵的计算为例,假设两幅图像中的对应点满足: 其中,H是平面单应矩阵,x和x’是图像中的对应点,则重投影误差的形式如下:
其中,H是平面单应矩阵,x和x’是图像中的对应点,则重投影误差的形式如下:
 subject to:
subject to:
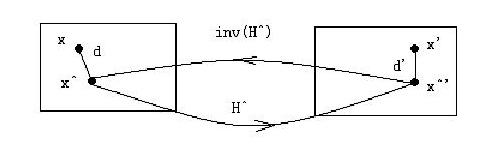
 其中,x 是x的估计值,H是H的估计。最小化重投影误差就是优化H 和x。从重投影误差公式可以看出,模型认为测量点并非绝对精确,而是存在一定的测量误差,因此需要重新估计图像点的坐标,而估计得到的新的图像点之间完美的满足单应关系。下图就是重投影误差的几何表述,d和d’的和即为重投影误差:
其中,x 是x的估计值,H是H的估计。最小化重投影误差就是优化H 和x。从重投影误差公式可以看出,模型认为测量点并非绝对精确,而是存在一定的测量误差,因此需要重新估计图像点的坐标,而估计得到的新的图像点之间完美的满足单应关系。下图就是重投影误差的几何表述,d和d’的和即为重投影误差:
 上面都是在假设图像点有测量误差的情况下讨论的,如果x和x’都是图像上的点,那么确实是满足上面的模型的。但是有一种特殊情形,那就是摄像机定位时通常都会遇见的,x不是图像点,而是平面标志点在世界坐标系下的坐标,只有x’是图像点。在这种情况下,由于标志点通常都是很标准的,都是严格按尺寸制定的,所以我们可以认为x是绝对准确的,那么此时只有x’存在测量误差。如下图:
上面都是在假设图像点有测量误差的情况下讨论的,如果x和x’都是图像上的点,那么确实是满足上面的模型的。但是有一种特殊情形,那就是摄像机定位时通常都会遇见的,x不是图像点,而是平面标志点在世界坐标系下的坐标,只有x’是图像点。在这种情况下,由于标志点通常都是很标准的,都是严格按尺寸制定的,所以我们可以认为x是绝对准确的,那么此时只有x’存在测量误差。如下图:
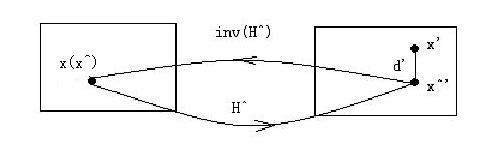 此时,x的估计x 就是它本身,即x=x,所以有:
此时,x的估计x 就是它本身,即x=x,所以有:
 那么重投影误差在强约束条件x=x^下就退化为:
那么重投影误差在强约束条件x=x^下就退化为:
 上式即为单边变换误差(Transfer error)。
上式即为单边变换误差(Transfer error)。
所以在这种情况下,单边几何变换误差才好的代价函数。也就是说,如果给重投影误差加上约束条件x=x^,重投影误差就退化为单边变换误差,并且极大地简化了优化算法。
同时,从上面的推导也可以得出结论:在使用已知标志点给摄像机定位时,重投影误差并非最好的选择,因为重投影误差模型会认为标志点存在误差,从而重新估计标志点的坐标,引入多余的误差;而此时,事实上,重投影误差已经退化为单边几何变换误差,所以在这种情况下,单边几何变换误差才好的代价函数。
再谈重投影误差:




